
Con un nuevo pabellón de investigación, la Universidad de Stuttgart sienta las nuevas bases de la arquitectura de construcción ligera mediante un monumento construido por un robot.
Monumento estable construido por un robot KUKA.
A la vez ligero y estable como una tela de araña: el pabellón de investigación 2014/2015 de la universidad de Stuttgart. En efecto, los empleados del Instituto de Diseño Computacional (ICD) y del Instituto de Construcciones Portantes y Diseño Constructivo (ITKE) se inspiraron en la naturaleza para realizar el diseño. Como modelo utilizaron la forma en que las arañas de agua construyen sus nidos debajo del agua. Dentro del agua, la araña construye con sus hilos una red en forma de campana que llena de aire. Esta envoltura de aire garantiza la supervivencia de la araña debajo del agua. Incluso pone sus huevos dentro de la envoltura. Inspirados en esta forma constructiva única, en un principio, el pabellón de investigación se compuso de una envoltura de lámina blanda de ETFE sustentada con aire comprimido. A continuación, paso a paso se fueron pegando fibras de carbono desde dentro con la ayuda de un robot KUKA de la familia KR QUANTEC ultra.

Monumento estable y ligero construido por un robot KUKA.
Prototipo construido por un robot.
El resultado: un caparazón de compuesto de fibras tan ligero como una pluma. Conforma el pabellón con una calidad arquitectónica única. Como las fibras de carbono solamente están colocadas donde son necesarias para reforzar la construcción, y el encofrado neumático se utiliza al mismo tiempo como envoltura del edificio integrada de forma funcional, se trata de un proceso constructivo que no genera residuos y que protege los recursos.
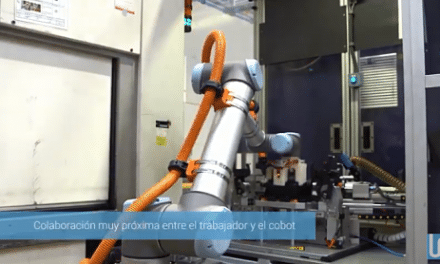
Para la colocación de las fibras de carbono en la parte interior de la lámina flexible, se ha desarrollado un proceso de producción robótico prototípico. En él se ha desafiado especialmente al control del robot, ya que la rigidez del encofrado neumático cambia durante el proceso de colocación de las fibras y proporciona deformaciones que varían. Para adaptar estos parámetros en el transcurso del proceso de producción, mediante un sistema de sensores integrado se detecta la posición y la fuerza de compresión actuales y se integra en tiempo real en el control del robot. Este tipo de sistema ciber-físico permite un acoplamiento retroactivo constante entre las condiciones de producción reales y la generación digital del código de control del robot. Esto no solo representa un importante desarrollo en el marco de este proyecto, sino que muestra nuevas posibilidades en general para los procesos de construcción robóticos.

KUKA roboter en la construcción del prototipo.
Durante la producción, paralelamente se depositaron nueve hilos de fibra de carbono previamente impermeabilizados con un total de 45 km de longitud en 5 km de ruta del robot con una velocidad media de 0,6 m/min. El pabellón comprende una superficie de aprox. 40 m² y un volumen de aprox. 130 m³ con una envergadura de 7,5 m y una altura de 4,1 m. El peso total es de aproximadamente 280 kg, lo que corresponde a un peso superficial de 7 kg/m². El pabellón se originó en la intersección entre la investigación de los dos institutos y la formación en el marco de los estudios de máster interdisciplinarios e internacionales ITECH. Es el resultado de un año y medio de trabajos de desarrollo de científicas y científicos, así como estudiantes de arquitectura, ingeniería y ciencias naturales.
Desarrollo del documento
Documento desarrollado por tecnoplc.com bajo una Licencia de Creative Commons Reconocimiento-NoComercial-CompartirIgual 4.0 Internacional.
Ante cualquier duda, consultar en www.tecnoplc.com.
Puedes ampliar esta información en www.kuka-robotics.com.
![]()



{kind=link}