
Ejemplo de marcha paro motores gobernados por un PLC S7-300 con un arranque temporizado y una parada también retardada después del paro mediante pulsadores. Se añaden varias indicaciones de fallo y de paradas de seguridad.
Control marcha paro motores trifásicos.
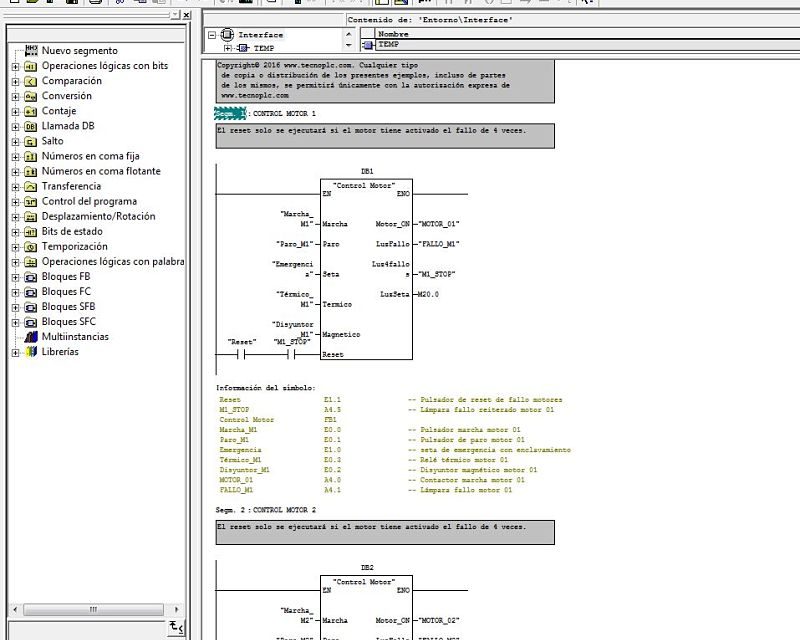
El objetivo es controlar dos motores trifásicos gobernados con sus contactores y protegidos con disyuntores y relés térmicos de manera que podamos detectar el fallo en alguno de ellos. Se utilizará una salida para cada motor, y varias entradas para las protecciones. La marcha paro motores se realizará mediante pulsadores y añadiendo una seta de emergencia. Se va a implementar una sola función FB para controlar ambos motores con esa misma Función FB, cambiando los parámetros de cada motor.

Componentes hardware utilizados.
E 0.0 BOOL Pulsador marcha motor 01
E 0.1 BOOL Pulsador de paro motor 01
E 0.2 BOOL Disyuntor magnético motor 01
E 0.3 BOOL Relé térmico motor 01
E 0.4 BOOL Pulsador marcha motor 02
E 0.5 BOOL Pulsador de paro motor 02
E 0.6 BOOL Disyuntor magnético motor 02
E 0.7 BOOL Relé térmico motor 02
E 1.0 BOOL seta de emergencia con enclavamiento
E 1.1 BOOL Reset Fallo motor.
A 4.0 BOOL Contactor marcha motor 01
A 4.1 BOOL Lámpara fallo motor 01
A 4.2 BOOL Contactor marcha motor 02
A 4.3 BOOL Lámpara fallo motor 02
A 4.4 BOOL Lámpara emergencia
A 4.5 BOOL Lámpara fallo reiterado motor 01
A 4.6 BOOL Lámpara fallo reiterado motor 02
El programa descargable está implementado en una CPU 315 2DP en Step 7 V5.5 + SP1. Pero fácilmente se puede cambiar el modelo y la versión una vez abierto el proyecto, en el hardware del proyecto, y seleccionar la CPU que se necesite.

Puedes encontrar ejemplos de programación para descargar en la zona de "Descargas". Ejemplos en MicroWin, en Step 7, en LOGO y en TIA Portal, para CPU y HMI. Ejemplos de aplicaciones reales, configuraciones, simulaciones, etc...
Componentes software utilizados.
Función FB: se implementa una FB con sus Db de instancia para cada uno de los motores.
Multiinstancias: declaradas dentro del FB.
Configurar FB con entradas y salidas.
Entradas del PLC: marcha paro motores, disyuntores, etc…
Salida del PLC que controlará los contactores…
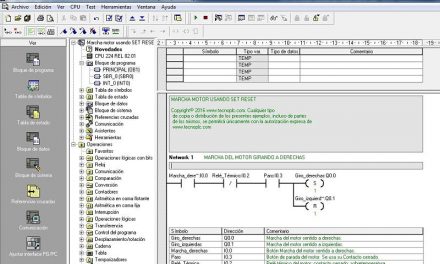
Función RESET – SET: para mantener activada una señal mediante un pulso.
Temporizador TON: utilización como retardo a la conexión.
Temporizador TOFF: utilización como retardo a la desconexión.
Marcas de ciclo: para conseguir intermitencias en las salidas.
Contadores: para el contaje de los fallos.

Secuencia de programación de la marcha paro motores en Step 7.
La programación seguirá la siguiente secuencia:
Arranque de motores: cuando se pulsa el pulsador de marcha, el motor arrancará pasados 5 segundos.
Parada de motores: cuando se pulsa el pulsador de paro, el motor parará a los 10 segundos.

Emergencia:
−Si la seta de emergencia se pulsa, la lámpara correspondiente se encenderá parpadeando
(además deberán detenerse todos movimientos).
Motores:
− Si la parada de emergencia está bien y las protecciones están bien y se pulsa la marcha y
no se pulsa el paro entonces se activará el contactor asociado quedando enclavado con la
temporización indicada.
− Si la parada de emergencia está bien y las protecciones están bien y se pulsa el paro y no
se pulsa la marcha entonces se desactivará el contactor asociado con la temporización
indicada.

− No habrá posibilidad de arranque de un motor si el número de fallos correspondiente se ha
superado, y no se ha reseteado el contador correspondiente.
Señalización:
− Si el térmico se activa se encenderá la lámpara correspondiente (parpadeando a frecuencia
mitad de la de emergencia).
− Si el magnético se activa se encenderá la lámpara correspondiente (parpadeando a igual
frecuencia que la emergencia).
− Con ambos fallos activados la lámpara correspondiente permanecerá fija.
− Si se supera el número de fallos indicado, se señalizará y se impedirá la maniobra hasta que
sea reseteado el contador correspondiente.

Anomalías:
La seta de emergencia cuando se pulse nos dará un cero lógico.
Los disyuntores y relés térmicos si no hay error nos darán un cero lógico.
Cuando exista algún error (emergencia, fallos motores, disyuntores, etc…) no se puede arrancar el motor.
Cuando se superen los 4 fallos de un motor, este motor no podrá arrancar hasta que se resetee estos errores.

Características MPI y Profibus para la conexión a la CPU.
Se ha establecido por defecto una dirección MPI para la comunicación MPI.
Dirección MPI: 15.
Velocidad: 187,5 Mbits/s
Se ha establecido por defecto una dirección Profibus DP para la comunicación Profibus.
Dirección Profibus: 2.
Velocidad: 1,5 Mbits/s
Hay que tenerlo en cuenta a la hora de conectarse del PC a la CPU y viceversa.

Si quieres descargar el ejemplo ponte en contacto con nosotros. Te facilitaremos el programa.

Desarrollado y publicado por www.tecnoplc.com. Licencia Creative Commons 4.0.![]()
{kind=link}